Manipulation robotisée d’un détecteur de rayons-X
Pour application sur lignes de lumière Synchrotron
Pour application sur lignes de lumière Synchrotron

Manipulation robotisée d’un détecteur de rayons-X
Pour application sur lignes de lumière Synchrotron
Pour application sur lignes de lumière Synchrotron
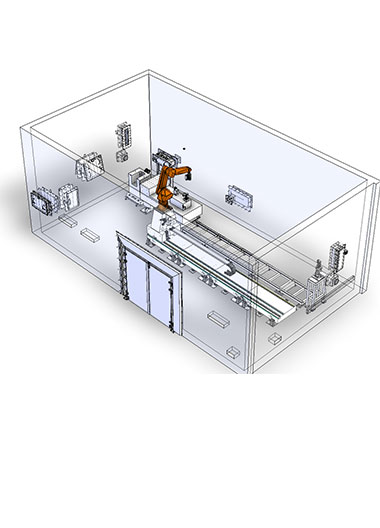
Ce système robotique est destiné au positionnement absolu et avec une grande stabilité d’un détecteur, afin d’observer des clichés de diffraction.
Le robot permet de déplacer le détecteur le long d’une sphère (=500 mm) centrée sur l’échantillon, de façon à identifier des directions pertinentes pour la diffraction. Ensuite le robot permet de déplacer le détecteur dans la direction identifiée, jusqu’à 5 m de l’échantillon, et ainsi collecter des clichés de diffraction avec une grande résolution.
Ce dispositif expérimental est réalisé de façon automatique avec une grande précision et une grande fiabilité.
La plate-forme est composée d’un bras de robot Stäubli TX2 de dernière génération, intégré sur une translation horizontale réalisée avec des blocs de granite, afin d’obtenir des performances mécaniques optimales (répétabilité et stabilité).
L’acquisition des images est synchronisée avec les mouvements du robot, et le détecteur est équipé d’une peau sensible pour des raisons de sécurité.
L’apprentissage de l’environnement et la calibration des outils sont réalisés de façon automatique au moyen de routines logicielles dédiées.
Le système intègre les électroniques de commande (alimentation, automate et automate de sécurité).
Une méthode de calibration dédiée et un algorithme de compensation, développés par IRELEC, permettent d’atteindre une précision absolue de positionnement du détecteur inférieure à 200 µm dans un volume d’inspection de 68 m3.
La communication avec le logiciel de supervision de la ligne est réalisée grâce à une connexion Ethernet.
Specifications
68 m3
Précision moyenne
189 µm
Précision @ 90%
292 µm
±1 µm pendant 44 heures après un temps de stabilisation de 4 heures (déplacement de 32 µm)
Contrôle de la température : ±0.1°C
Course
5.5 m
Répétabilité
20 µm
Rectitude (vertical/horizontal)
30 µm / 50 µm

Références
Publications
|
Robotizing Soleil beamlines to improve experiments automation. |
Journal of Neutron Research, vol. 19, n°1-2 pp 27-32, 2017 Remote crystal alignment at cryogenic T° for Neutron scattering |
|---|---|
|
Process Automation at SOLEIL: Two Applications Using Robot Manipulators. |
18th Int. Conf. on Accelerator and Large Experimental Physics Control Systems (ICALEPCS'21), Shanghai, China, Oct. 2021 |